5. Localization#
[1]:
from pathlib import Path
from pickle import load
import covseisnet as csn
Read covariance#
[2]:
# Save
with open("../data/undervolc_covariance.pickle", "rb") as file:
data = load(file)
times = data["times"]
frequencies = data["frequencies"]
covariances = data["covariances"]
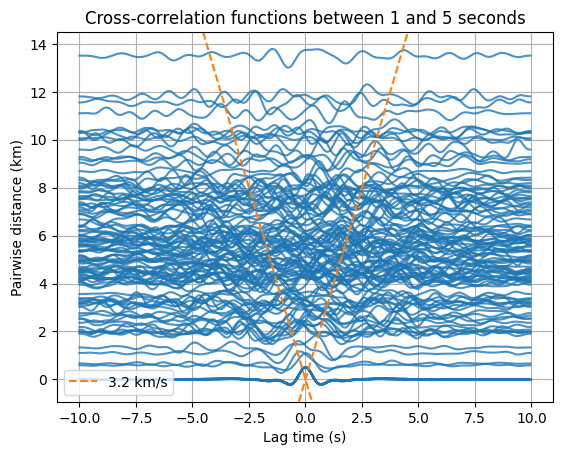
Plot correlation#
[3]:
import matplotlib.pyplot as plt
frequency_band = 0.2, 1
# Calculate cross-correlation
lags, pairs, cross_correlation = csn.calculate_cross_correlation_matrix(
covariances
)
# Get inter-station distance
distances = csn.pairwise_great_circle_distances_from_stats(
cross_correlation.stats
)
# Bandpass filter
# cross_correlation = cross_correlation.mean(axis=1)
cross_correlation = cross_correlation[:, 0]
cross_correlation = cross_correlation.bandpass(frequency_band)
cross_correlation = cross_correlation.taper()
# Plot
fig, ax = plt.subplots()
for i_pair, pair in enumerate(pairs):
cc = cross_correlation[i_pair] / abs(cross_correlation[i_pair]).max() * 0.5
ax.plot(lags, cc + distances[i_pair], color="C0", alpha=0.8)
# Plot some velocity
v = 3.2
ax.axline((0, 0), slope=v, color="C1", label=f"{v} km/s", ls="--")
ax.axline((0, 0), slope=-v, color="C1", ls="--")
ax.legend(loc="lower left")
ax.grid()
periods = list(sorted(int(1 / f) for f in frequency_band))
ax.set_title(
f"Cross-correlation functions between {periods[0]} and {periods[1]} seconds"
)
ax.set_xlabel("Lag time (s)")
ax.set_ylabel("Pairwise distance (km)")
[3]:
Text(0, 0.5, 'Pairwise distance (km)')
[4]:
# Read
stream = csn.read("../data/undervolc.mseed")
# Pre-process
stream.normalize(global_max=True)
stream.filter("highpass", freq=0.5)
stream.time_normalize(method="smooth", smooth_length=1001)
stream.taper(max_percentage=0.01)
stream.assign_coordinates("../data/undervolc.xml")
[5]:
import numpy as np
import h5py as h5
from covseisnet.travel_times import TravelTimes, DifferentialTravelTimes
# Calculate cross-correlation
lags, pairs, correlations = csn.calculate_cross_correlation_matrix(covariances)
# Pre-process the cross-correlation functions
correlations = correlations.taper(0.1)
correlations = correlations.bandpass(frequency_band=(1, 5))
correlations = correlations.envelope()
correlations = correlations.smooth(sigma=30)
correlations /= correlations.max(axis=-1, keepdims=True)
correlations = correlations.squeeze()
# Read the model
filepath_model = Path("../data/undervolc_vs_mordret_2015.h5").absolute()
velocity_field_name = "Vs"
# The h5 file contains the velocity model in a 3D grid with the following
# dimensions in order: longitude, latitude, depth. The depth and velocity are
# in meters and meters per second, respectively.
with h5.File(filepath_model, "r") as velocity_model:
# Coordinates
lon = np.array(velocity_model["longitude"])
lat = np.array(velocity_model["latitude"])
depth = np.array(velocity_model["depth"])
# Velocity
velocity = np.array(velocity_model[velocity_field_name])
# Get extent
model = csn.velocity.model_from_grid(lon, lat, depth, velocity)
# model[np.isnan(model)] = 340/1000
# Obtain the travel times
travel_times = {
trace.stats.station: TravelTimes(stats=trace.stats, velocity_model=model)
for trace in stream
}
# Calculate differential travel times
differential_travel_times = {}
for pair in pairs:
station_1, station_2 = pair
tt1 = travel_times[station_1]
tt1[np.isinf(tt1)] = np.nan
tt2 = travel_times[station_2]
tt2[np.isinf(tt2)] = np.nan
differential_travel_times[pair] = DifferentialTravelTimes(tt1, tt2)
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
/home/eric/WORK/software/covseisnet/covseisnet/travel_times.py:224: RuntimeWarning: divide by zero encountered in scalar divide
solver.solve()
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
Using Pykonal to calculate travel times.
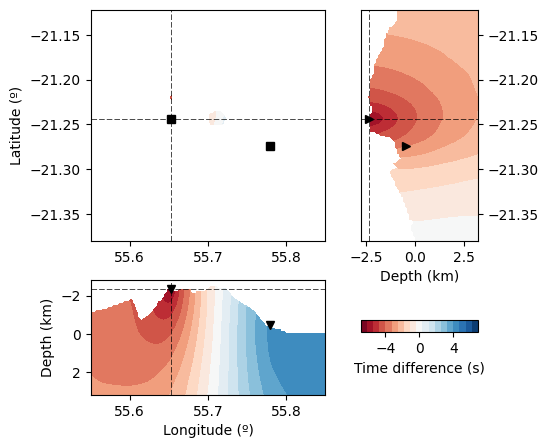
[6]:
print(differential_travel_times[("UV01", "UV02")])
DifferentialTravelTimes(
lon: [55.55, 55.85] with 151 points
lat: [-21.38, -21.12] with 130 points
depth: [-2.80, 3.20] with 61 points
mesh: 1,197,430 points
nan values: 372,664 points
min: -6.508
max: 6.920
)
[7]:
csn.plot.grid3d(
differential_travel_times[("UV01", "UV02")],
label="Time difference (s)",
)
[7]:
(<Figure size 500x500 with 4 Axes>,
{'xy': <Axes: label='xy', ylabel='Latitude (º)'>,
'zy': <Axes: label='zy', xlabel='Depth (km)'>,
'xz': <Axes: label='xz', xlabel='Longitude (º)', ylabel='Depth (km)'>,
'cb': <Axes: label='cb', xlabel='Time difference (s)'>})
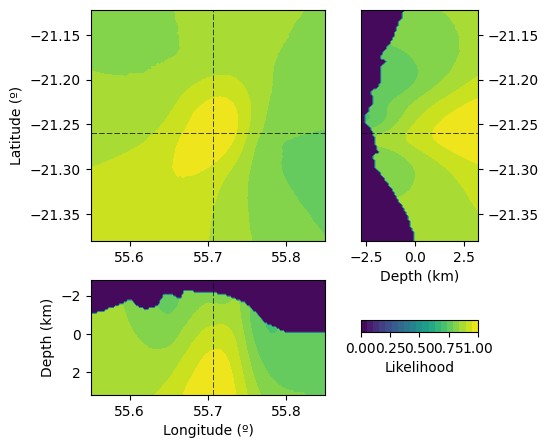
Coherence#
[8]:
from covseisnet.backprojection import DifferentialBackProjection
# Calculate likelihood
backprojection = DifferentialBackProjection(differential_travel_times)
backprojection.calculate_likelihood(cross_correlation=correlations[-1])
# Plot likelihood in 3D
ax = csn.plot.grid3d(backprojection, cmap="viridis", label="Likelihood")
/home/eric/WORK/software/covseisnet/covseisnet/backprojection.py:82: RuntimeWarning: invalid value encountered in cast
lags = np.round(self.moveouts[pair] * sampling_rate).astype(int)