Locating events within a constant velocity model#
This example shows how to calculate the differential travel times of seismic waves in a constant velocity model between two receivers. We first define the model and the sources and receivers coordinates. We then calculate the travel times for each receiver using the class covseisnet.travel_times.TravelTimes, and we calculate the differential travel times using the class covseisnet.travel_times.DifferentialTravelTimes. Finally, we locate the source of the seismic waves using the class
covseisnet.backprojection.DifferentialBackProjection and plot the results on a map.
[5]:
from cartopy.crs import PlateCarree
import matplotlib.pyplot as plt
import covseisnet as csn
from covseisnet.travel_times import TravelTimes, DifferentialTravelTimes
from covseisnet.backprojection import DifferentialBackProjection
Load seismograms#
We first load the seismograms from the example data set. We downloaded the seismogram from the Wilber 3 interface, archived at this link. These seismograms contains the record of the Mb 4.4 earthquake that occurred in the Aegean Sea on October 5, 2020 at 14:57:51 UTC at 39.9°N, 23.3° E and 10 km depth.
We also pre-process the seismograms by merging overlapping traces, removing the linear trend, filtering the data with a high-pass filter with a corner frequency of 0.01 Hz, and synchronizing the traces, as shown in the other examples.
[6]:
# Load seismograms
stream = csn.NetworkStream.read("data/aegean_sea_example.mseed")
# Pre-process
stream.merge(1, fill_value=0)
stream.detrend("linear")
stream.filter("highpass", freq=0.01)
stream.synchronize()
Station and source coordinates#
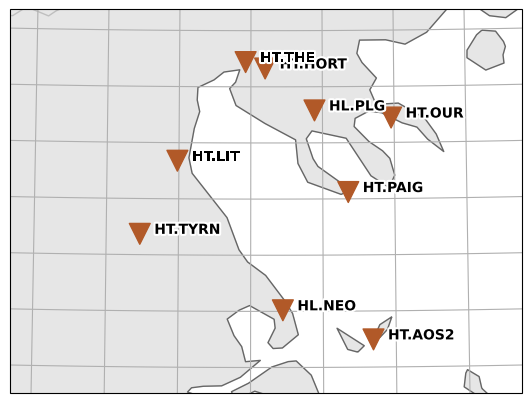
We associate the coordinates of the different stations to the corresponding seismograms. We first download the inventory of the seismograms from the National Observatory of Athens (NOA) data center. We then associate the coordinates to the seismograms using the method :func:~covseisnet.stream.Stream.assign_coordinates. The :class:obspy.Inventory object is then used to plot the stations on a map.
We also add the known source coordinates of the earthquake to the map, to compare the location of the earthquake with the location of the backprojection results.
[7]:
# Get inventory to assign station coordinates
inventory = stream.download_inventory(datacenter="NOA")
stream.assign_coordinates(inventory)
fig = inventory.plot(projection="local", resolution="h")
# Plot source coordinates
source_location = 23.3465, 39.8812, 10
fig.axes[0].plot(*source_location[:2], "k*", markersize=20, transform=PlateCarree())
# Extract natural extent for later use
extent = fig.axes[0].get_extent(crs=PlateCarree())
Evaluate covariance matrix#
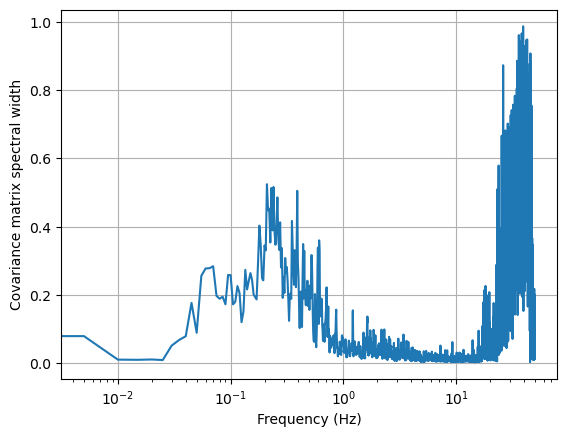
We calculate the covariance matrix of the seismograms using the method :func:~covseisnet.covariance.calculate_covariance_matrix. We use a window duration of 200 s, which allow for the slowest possible seismic waves to propagate between the stations (overestimating the travel time). We average the covariance matrix over 5 windows, which results in a single time window.
In this specific case, the coherence is a function of the frequency only. We observe the earthquake-related signal induces a strong wavefield coherence (that is, a low spectral width) between 1 and 10 Hz in particular.
[8]:
# Compute covariance matrix
times, frequencies, covariances = csn.covariance.calculate_covariance_matrix(
stream, window_duration=200, average=5, whiten="none"
)
# Calculate coherence
coherence = covariances.coherence(kind="spectral_width")
# Show
fig, ax = plt.subplots()
ax.semilogx(frequencies, coherence.squeeze())
ax.set_xlabel("Frequency (Hz)")
ax.set_ylabel("Covariance matrix spectral width")
ax.grid()
Evaluate the pairwise cross-correlation functions#
We calculate the pairwise cross-correlation functions between the seismograms using the method :func:~covseisnet.correlation.calculate_cross_correlation_matrix. We exclude the autocorrelation functions from the calculation, as they are not useful for the backprojection.
We also pre-process the cross-correlation functions by tapering the edges of the functions, bandpass filtering the data between 1 and 5 Hz, calculating the envelope of the data, and smoothing the data with a Gaussian filter with a standard deviation of 30 samples. Finally, we normalize the data by the maximum value of each cross-correlation function.
[9]:
# Calculate cross-correlation functions
lags, pairs, correlations = csn.correlation.calculate_cross_correlation_matrix(
covariances, include_autocorrelation=False
)
# Pre-process the cross-correlation functions
correlations = correlations.taper(0.1)
correlations = correlations.bandpass(frequency_band=(1, 5))
correlations = correlations.envelope()
correlations = correlations.smooth(sigma=30)
correlations /= correlations.max(axis=-1, keepdims=True)
correlations = correlations.squeeze()
Calculate travel times#
We calculate the travel times of the seismic waves between the stations using the class :class:~covseisnet.travel_times.TravelTimes. We use a constant velocity model with a velocity of 3.5 km/s, assuming that the S-waves will dominate the seismic records. We then calculate the differential travel times between the stations using the class :class:~covseisnet.travel_times.DifferentialTravelTimes.
[11]:
# Define the velocity model
extent_with_depth = extent + (-3, 20)
model = csn.velocity.VelocityModel(
extent=extent_with_depth, shape=(40, 40, 40), velocity=3.5
)
# Obtain the travel times
travel_times = {
trace.stats.station: TravelTimes(stats=trace.stats, velocity_model=model)
for trace in stream
}
# Calculate differential travel times
differential_travel_times = {}
for pair in pairs:
station_1, station_2 = pair
differential_travel_times[pair] = DifferentialTravelTimes(
travel_times[station_1],
travel_times[station_2],
)
Locate the source with backprojection#
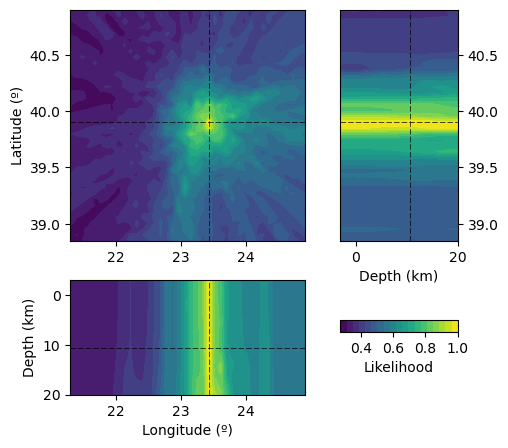
We locate the source of the seismic waves using the class :class:~covseisnet.backprojection.DifferentialBackProjection. We use the differential travel times calculated previously and the pre-processed cross-correlation functions. We calculate the likelihood of the source location using the method :func:~covseisnet.backprojection.DifferentialBackProjection.calculate_likelihood.
[13]:
# Calculate likelihood
backprojection = DifferentialBackProjection(differential_travel_times)
backprojection.calculate_likelihood(cross_correlation=correlations)
# Plot likelihood in 3D
fig, ax = csn.plot.grid3d(backprojection, cmap="viridis", label="Likelihood")
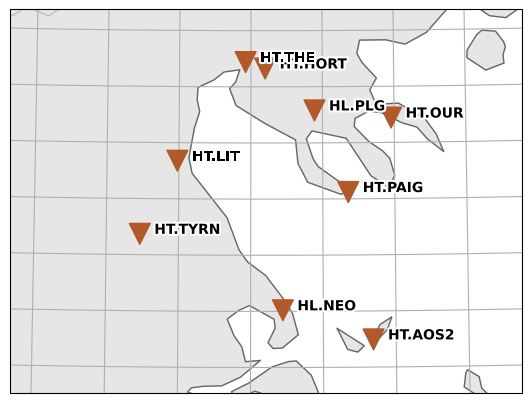
Compare maximum likelihood with known source location#
The maximum likelihood of the source location is calculated using the method :func:~covseisnet.backprojection.DifferentialBackProjection.maximum_coordinates. We plot the source location and the maximum likelihood of the source location on the map.
[16]:
# Infer maximum coordinates
max_likelihood = backprojection.maximum_coordinates()
# Plot source and estimated location
fig = inventory.plot(projection="local", resolution="h")
fig.axes[0].plot(*source_location[:2], "k*", markersize=20, transform=PlateCarree())
fig.axes[0].plot(*max_likelihood[:2], "r*", markersize=20, transform=PlateCarree())
[16]:
[<matplotlib.lines.Line2D at 0x14950bb60>]